|
Qualcomm Navigator Flight Control Interface
2.0
|
|
Qualcomm Navigator Flight Control Interface
2.0
|
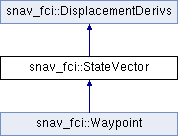
Structure containing position and yaw along with their derivatives. More...
#include <state_vector.hpp>
Public Member Functions | |
| StateVector () | |
| Construct a StateVector initialized to all zeros. | |
| StateVector (Eigen::Vector3f position) | |
| StateVector (Eigen::Vector3f position, float yaw) | |
| StateVector & | operator= (const snav_traj_gen::StateVector &sv) |
 Public Member Functions inherited from snav_fci::DisplacementDerivs Public Member Functions inherited from snav_fci::DisplacementDerivs | |
| DisplacementDerivs () | |
| Construct a DisplacementDerivs object initialized to all zeros. | |
Public Attributes | |
| float | yaw |
| float | yaw_rate |
| float | yaw_acceleration |
| Public Attributes inherited from snav_fci::DisplacementDerivs | |
| Eigen::Vector3f | position |
| Eigen::Vector3f | velocity |
| Eigen::Vector3f | acceleration |
| Eigen::Vector3f | jerk |
Structure containing position and yaw along with their derivatives.
| float snav_fci::StateVector::yaw |
Yaw angle [rad]
| float snav_fci::StateVector::yaw_acceleration |
Yaw acceleration [rad/s^2]
| float snav_fci::StateVector::yaw_rate |
Yaw rate [rad/s]
 1.8.6
1.8.6

